
- 热门阅读

- TAG
-
- 导 (1)
- 钓鱼竿 (1)
- 踊跃 (1)
- 积极 (1)
- 欢迎 (1)
- 涓栫晫 (1)
- 三招儿 (1)
- 尴尬 (1)
- mc (1)
- 见招拆招 (1)
- 真假 (2)
- 内部 (1)
- 光威集团 (1)
- 偷驴 (1)
- 龙王 (1)
- 鉴定 (1)
- 制假 (1)
- 假冒 (1)
- 鉴别 (3)
- 活路 (1)
- 商家 (1)
- 辨别 (2)
- 五招 (1)
- 假货 (1)
- 500块钱 (1)
- 真伪 (2)
- 25℃ (1)
- 回温 (1)
- 幅度 (1)
- 大雾 (1)
- 米线 (1)
- 5.4 (1)
- 赶海 (1)
- 18℃ (1)
- 最高温 (2)
- 偏 (1)
- 周四 (1)
- 预报 (1)
- 海洋 (1)
- 失眠 (1)
- 冰岛 (1)
- 4万次 (1)
- 逾 (1)
- 20天 (1)
- 今晚 (1)
- 4~5级 (1)
- 可达 (2)
- 陆地 (1)
- 南风 (1)
- 白天 (1)
- 夜间 (1)
- 蓝色 (1)
- 日照 (1)
- 海警 (1)
- 遇险 (1)
- 掀翻 (1)
- 海浪 (1)
- 广西 (1)
- 滨滨 (1)
- 风冷 (2)
- 西北 (2)
- 多云转晴 (1)
- 4月26日 (1)
- 深度 (1)
- 5级 (2)
- 开关 (1)
- 钟 (1)
- 四面 (1)
- 检验 (1)
- 汶河 (1)
- 战 (1)
- 巧借 (1)
- 东西南北 (1)
- 春风 (1)
- 4~5级 (1)
- 宜 (1)
- 四忌 (1)
- 近海 (1)
- 刮风天 (1)
- 呆 (1)
- 刮 (1)
- 多变 (1)
- 二 (1)
- 2种 (1)
- 毛病 (1)
- 风向 (6)
- 大风大浪 (1)
- 无风 (2)
- 病毒 (1)
- 感染 (1)
- 椋庡悜 (1)
- 马上 (1)
- 北风 (5)
- 4-5级 (2)
- 9℃ (1)
- 第二天 (1)
- 突然 (1)
- 药剂 (1)
- 果园 (1)
- 气象预报 (1)
有一个程序员老爸的快乐:轻松制作DIY遥控小船
周末带小朋友去公园玩耍,别的小孩在池塘里玩饮料瓶做的漂流船,看着他欢乐的跟着跑跳,无比羡慕的眼神,却又不能上手的小失落,又回想起儿时用泡沫板和小电机以及电池做的小船,和那时对于电驱动产生的无比兴趣,我决定升级一下儿时的装备,基于STM32给小朋友DIY一个遥控小船,使他成为公园里焦点,同时也期待他对电气控制产生一点点好奇。
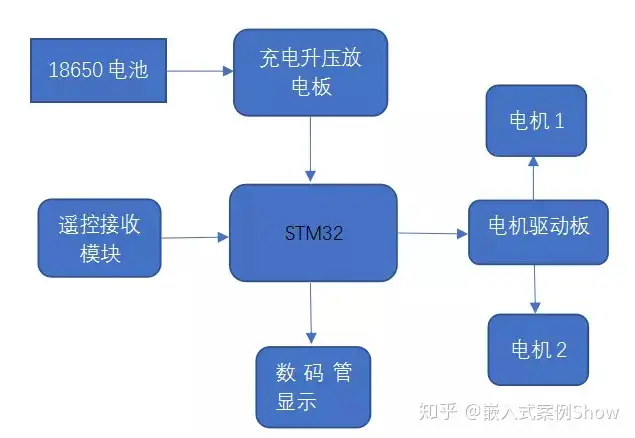
基本构想如下:stm32驱动两个小电机,小电机上安装两个螺旋桨,可以实现双桨前进、后退,单桨转弯等。供电使用18650电池,通过升压放电板管理电池的充放电。遥控使用最廉价的红外遥控,来控制小船的各种动作。同时可以增加一组数码管作为输出设备。
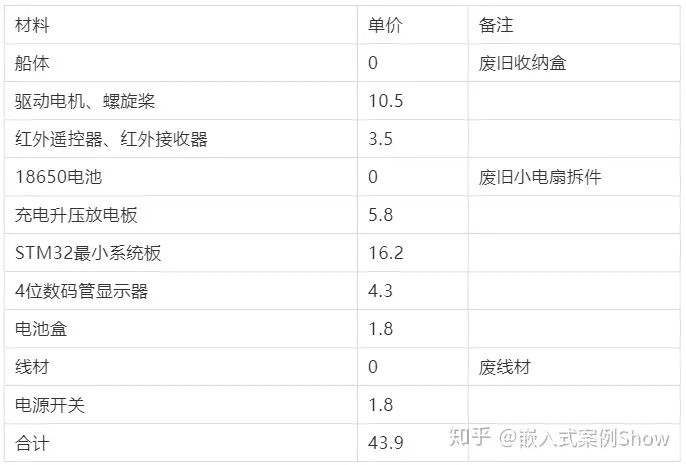
在万能的某宝上可以淘到所有需要的材料,并且价格都十分实惠。
>>红外遥控模块
一般遥控玩具使用的是2.4G高频无线遥控模块,但是本着能省则省的原则,选用遥控器带接收头3.5元还包邮的HX1838红外遥控模块。这种遥控器类似电视遥控器,优点是便宜,开发简单,缺点是控制距离短,并且要像遥控电视一样指着玩具操作,这些缺陷留着下一代产品迭代时升级。

>>电机驱动模块
电机使用直流小电机,3-6V可驱动,使用一片L298N驱动板驱动。STM32输出PWM可调速,可正反转。


>>数码管显示
基于TM1637的四位数码管,用于显示一些简单的信息。TM1637是天微公司出品的LED驱动专用芯片,集成简单,开发方便。除了TM1637,天微公司还有一系列TM16XX的芯片,主要区别就是位输出和段输出个数多少。

>>电池和充放电模块
18650电池具有容量大,寿命长,安全性高等优点,普遍使用在充电宝,笔记本电池、仪器仪表中,甚至特斯拉的电池组也是由7000多节这样的电池组合成的。充放电线路板,主要的作用是将电池3.7V的输出电压升压到5V,供给STM32及外围电路使用,同时还具备给电池充电的功能。实际上等同于一个充电宝,充电宝的原理就是若干个18650电池并联,再用一块充放电板管理而已。


>>红外遥控器驱动
HX1838采用的是 NEC 编码格式。载波频率为38khz。
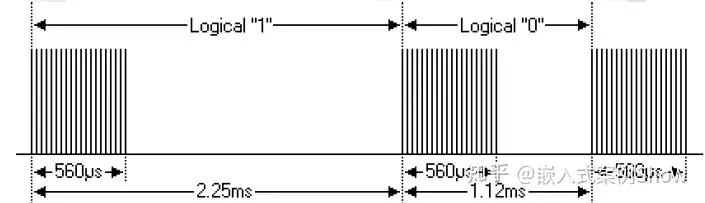
逻辑1是2.25ms,脉冲时间560us;逻辑0为1.12ms,脉冲时间560us。根据脉冲时间长短来解码。
协议示意图:

一组数据组成:
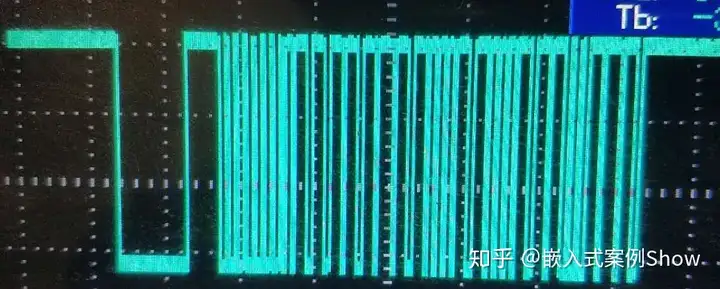
起始是9ms的高电平脉冲4.5ms的低电平8位地址码,低位在前8位地址码的反码,用于校验8位命令码,低位在前8位命令码的反码。需要注意的是1838红外一体接收头为了提高接受灵敏度。输入高电平,其输出的是相反的低电平。实际测量接收到的按键波形如下图,可以看到电平是相反的。
代码实现:
使用下降沿外部中断作为一次按键的检测触发,然后每个20us读取一次数据管脚,按照上述的协议逻辑,读出一个u32的数据。
经过调试,得到遥控器的按键键值如下:
另外由于NEC编码格式的红外遥控广泛的用于电视遥控,我们也可以找一个电视遥控器,把键值读出来,写入到stm的程序中,这样就可以用电视遥控器来操作小船了。
>>数码管显示驱动
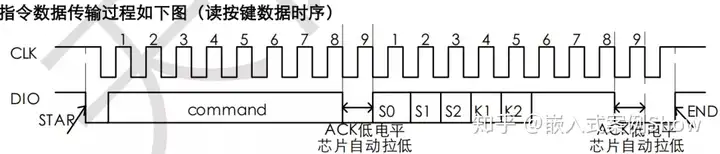
TM1637与其他的一些TM芯片有一些区别,没有同步通信的STB脚,控制时序也有相应改变。
在输入数据时当CLK是高电平时,DIO上的信号必须保持不变;只有CLK上的时钟信号为低电平时,DIO上的信号才能改变。数据输入的开始条件是CLK为高电平时,DIO由高变低;结束条件是CLK为高时,DIO由低电平变为高电平。TM1637的数据传输带有应答信号ACK,当传输数据正确时,会在第八个时钟的下降沿,芯片内部会产生一个应答信号ACK将DIO管脚拉低,在第九个时钟结束之后释放DIO口线。
代码实现:
>>小船控制逻辑
目前的逻辑比较简单, 就是收到按键后控制电机的转停。
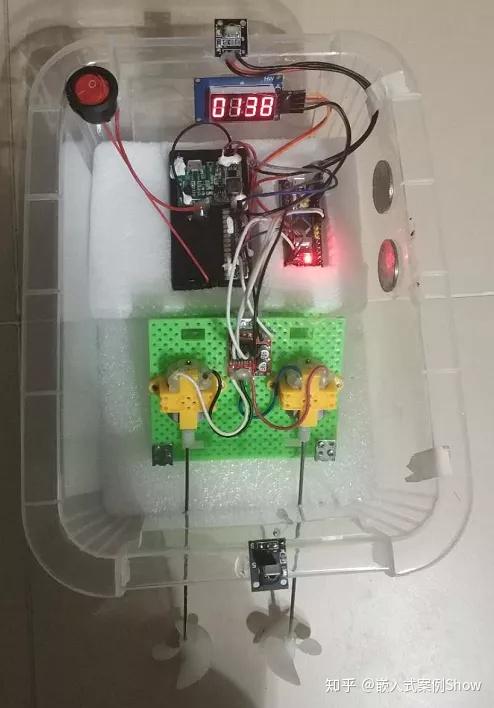
DIY成品展示和演示视频
>>遥控不灵敏
毕竟红外遥控的使用场合并不是移动的物体上,再加上距离近,经常会出现遥控要按多次的情况。后期考虑改进stm的协议处理方法,增加容错性,如果还是不行就考虑升级为2.4G专用的玩具遥控。
>>防水性问题
正常使用不会有水进入,但是在没有大人的情况下交给小孩操作,就没那么保险了。
后期考虑升级防水性能。
>>没有声光电,不够酷炫。
考虑升级,增加led灯条。
如果有感兴趣的同学可以私信索取代码工程和某宝组件链接。
相关内容
- 太湖不愧是垂钓者的乐园,这个湿地公园还是全国钓鱼竞赛训练基地央视“一姐”朱迅的消失,是整个主持界的悲哀和损失
- 【打击治理电信网络诈骗犯罪】盘点生活中离我们最近的几种诈骗类型
- 【打击治理电信网络诈骗犯罪】盘点生活中离我们最近的几种诈骗类型
- 魔兽WLK:休闲党必备的专业!可获两个稀有物品,还有奇葩头衔?
- 攻略分享:最好在8.0前夕之前完成的事情
- 攻略分享:最好在8.0前夕之前完成的事情
- 攻略分享:最好在8.0前夕之前完成的事情
- 攻略分享:最好在8.0前夕之前完成的事情
- 魔兽世界:钓鱼党聊天党必钓的水下坐骑[深海喂食者]获取攻略介绍
- 魔兽世界8.0上线前应该做的8件事 绝版预警
- 魔兽世界8.0上线前应该做的8件事 绝版预警
- 魔兽世界7.0四个最难刷的声望 最后一个还有人不知道
